Coordinate and optimize 100+
autonomous robots in real time.
Achieve less than 1% error between
simulation and actual operations.
Dynamically generate non-stop,
congestion-free paths—
boosting operational efficiency by over 32% on average.
Flexibly adapts to dynamic workflows and varied layouts,
even in large-scale manufacturing environments.
Enable multiple robots to work on a single job simultaneously
with scenario-based scheduling and repeated optimization.
Maximize robot utilization through parallel task distribution—
all managed through an intuitive, visual interface.

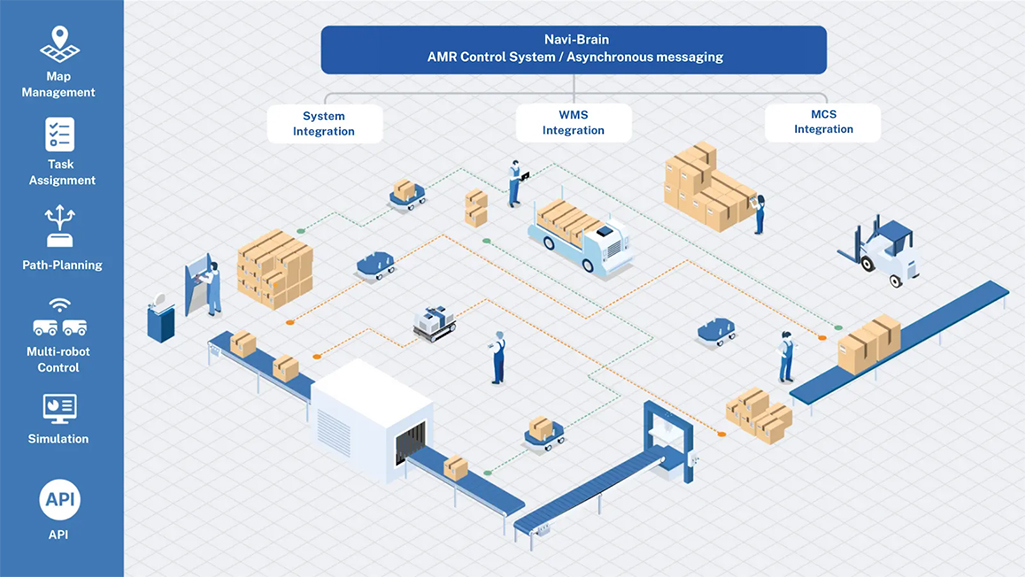
Seamlessly control diverse robot types—from low-profile AMRs to autonomous forklifts—within a single centralized system.
Sensor and environmental data are analyzed collectively to generate optimal paths, regardless of brand or model.
✔️ Powered by the VDA 5050 global standard protocol
✔️ Zero complexity, full integration across mixed fleets
✔️ Combines centralized and distributed control for reliable mobility in complex environments
Enhance safety and productivity with real-time detection and obstacle avoidance.
Recalculates paths in under 0.5 seconds to adapt to unexpected events.
Automatically detects obstacles and generates optimized paths in under 0.3 seconds.
Ensures stable operation even in narrow aisles and complex layouts.
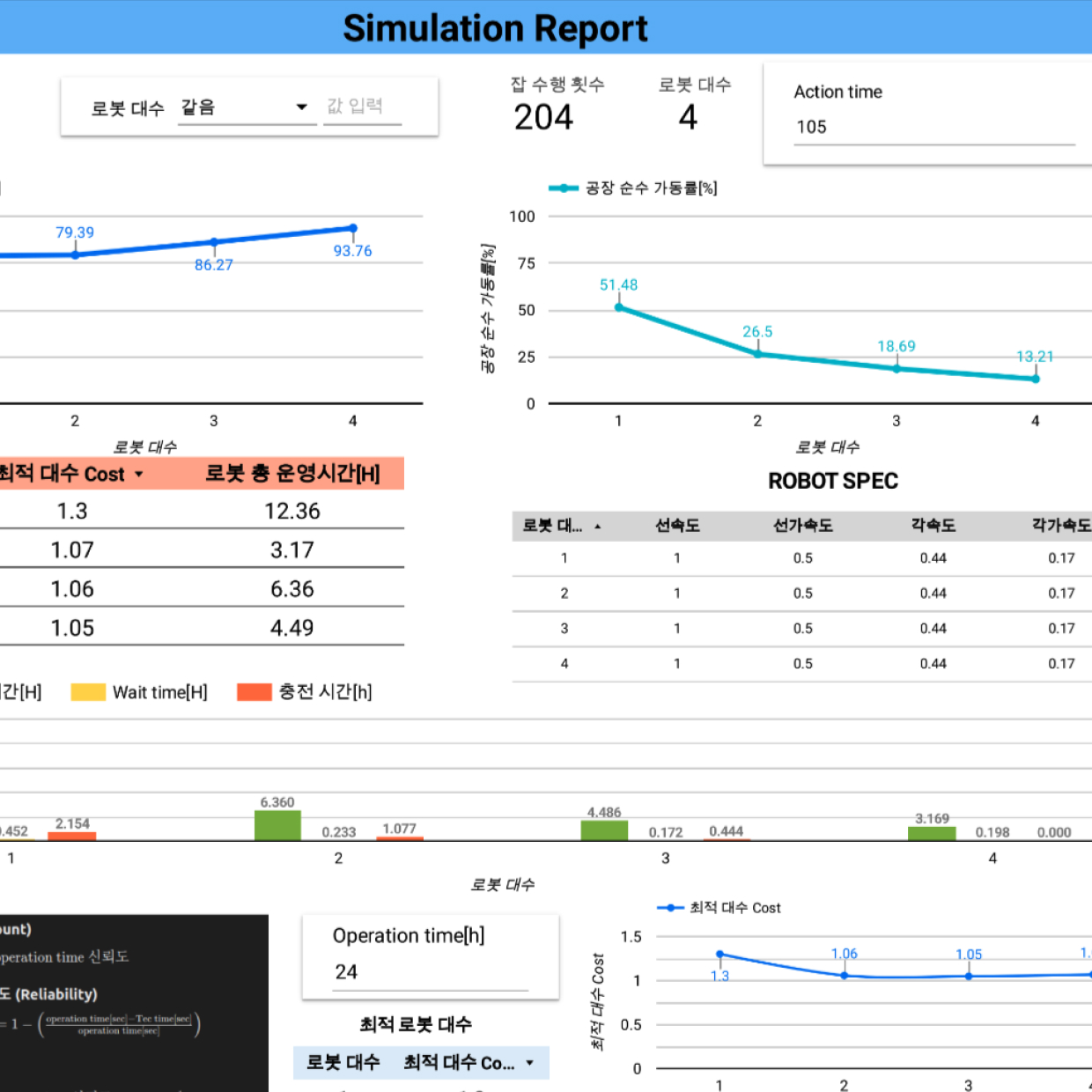
Optimize Task Allocation with Production Forecasting
Simulate operations before deployment to minimize cost and identify the most effective setup.
Monitor robot movement, status, and task completion in real time.
Analyze battery usage and utilization rates to build accurate and efficient production plans.
나비프라 ('www.navifra.com'이하 'navifra')은(는) 「개인정보 보호법」 제30조에 따라 정보주체의 개인정보를 보호하고 이와 관련한 고충을 신속하고 원활하게 처리할 수 있도록 하기 위하여 다음과 같이 개인정보 처리방침을 수립·공개합니다.