고속주행시 위치 추정이 불안정한 경우
주행 정밀도가 필요한 경우
정지 및 반복 정밀도 향상을 원할 경우
주행 정밀도가 필요한 경우
장애물이 회피가 필요한 경우
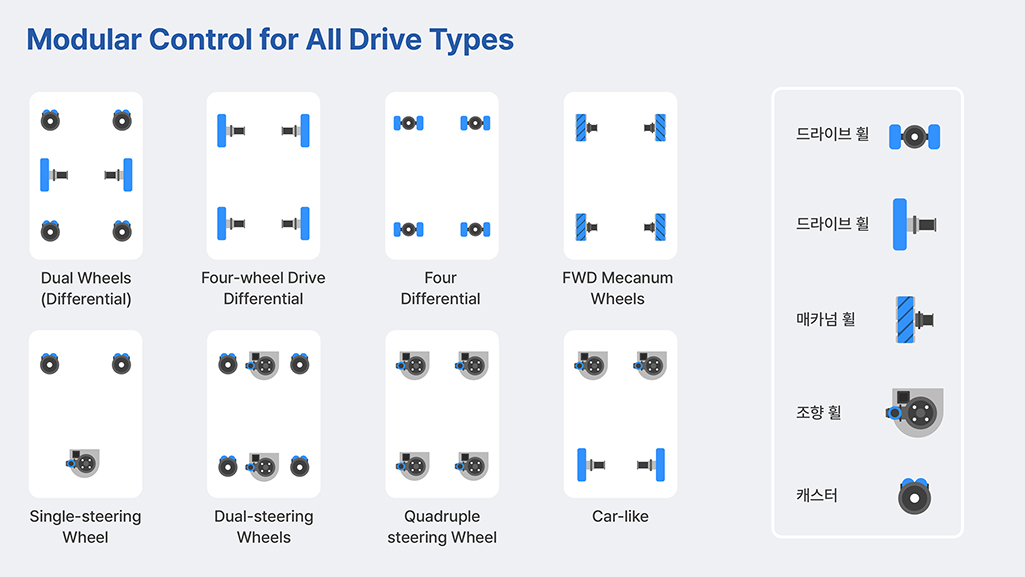
고정밀 모션 제어가 필요한 경우
모터와 모터 드라이버 제어가 필요한 경우
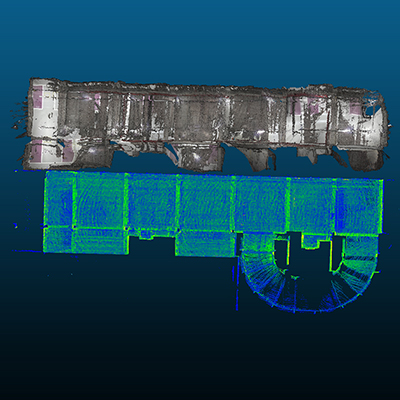
10mm 정밀 해상도의 1km 이상 대면적 지도 생성기술
±5mm, 0.5˚ 수준의 정밀 위치추정
3m/s 고속 주행에도 안정성 있는 위치추정
IMU 센서와의 융합을 통해 울퉁불퉁한 바닥, 미끄러운 바닥 등
예기치 못한 환경 변화에도 강인한 위치 추정
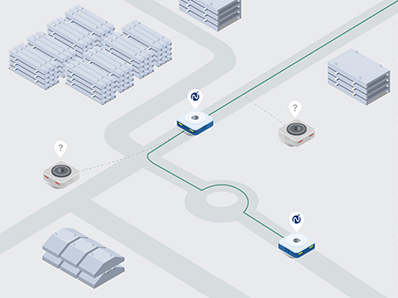
리플렉터, 바코드 등과 같은 인공표식과
자연표식을 활용한 하이브리드 위치 인식이 가능하여
동적인 환경에서도 안정적인 위치 인식이 가능
ROS1/ROS2, x86/ARM 아키텍처 등
다양한 로봇 운영 환경에 빠르게 적용 가능해,
높은 범용성과 유지보수 편의성 보장
±5mm, ±0.5º 정밀 도착 제어 모션 기능
±20mm 주행 정밀도로 좁은 구역에서 주행가능
차선기반 회피 모션으로 공장환경에서도 안전한 회피기능
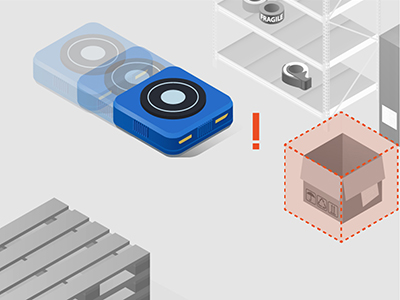
사람과 로봇이 함께 있는 공간에서 주행하거나 장애물이 많은 환경에 특화된 경로 계획
정적, 동적 장애물 탐지 및 회피
로봇 종류 및 환경에 따라 장애물 회피 모드 변경 가능
센서 자동 캘리브레이션 및 자동 품질테스트 기능을 통해 다양한 타입의 구동부를 제어 하고 위치 캘리브레이션
Motor/LiDAR 튜닝 자동화를 통한 쉽고 빠른 로봇 최적화로 로봇 대량 생산 품질 일정화
CAN, Serial, Ethercat 등 다양한 인터페이스 지원
대표적인 상업용 모터 브랜드에 대한 인터페이스 프로토콜 보유
안전하고 정밀한 제어를 위해 알고리즘과 파라미터 제공

나비프라 ('www.navifra.com'이하 'navifra')은(는) 「개인정보 보호법」 제30조에 따라 정보주체의 개인정보를 보호하고 이와 관련한 고충을 신속하고 원활하게 처리할 수 있도록 하기 위하여 다음과 같이 개인정보 처리방침을 수립·공개합니다.