Create jobs by scheduling individual robot’s pre-assigned actions(tasks).
Assign jobs to optimal robots using the job assignment function.
Create an environment which that minimizes deadlock situations between multiple robots.
Create traffic rules by applying attributes to objects on the map.
Deploy virtual robots in the real-world environment for simulations.
Derive results regarding the optimal number of operating robots, job assignment, and traffic management in simulations.
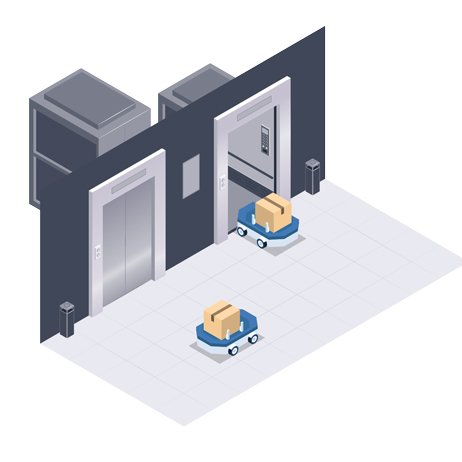
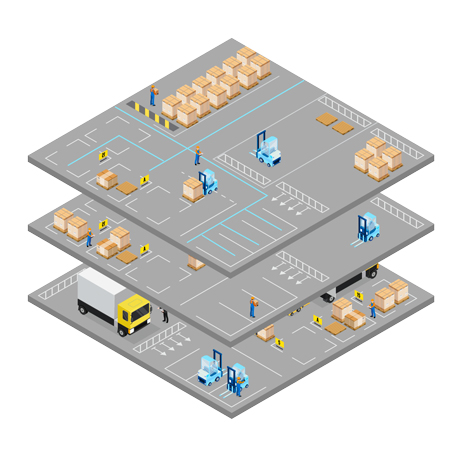
The robot control system, Navibrain, enables inter-floor movement through elevators, allowing various tasks to be performed in a wider space without constraints on floor-to-floor movement.
Scheduling function where n or more robots collaborate on one task.
Gather tasks to create scenarios and review and modify collaborative situations between robots by repeating the configured scenarios.
Parallel task assignment feature for job optimization.
Maximizing robot operation efficiency.
Easy task creation through intuitive UI.
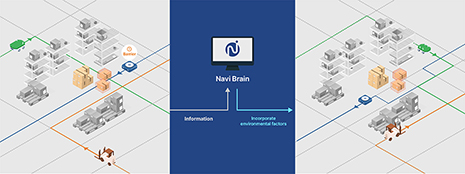
Utilize the sensor configurations of various AMRs and environmental information obtained from multiple directions to integrate into the MAPF algorithm.
Combine centralization and decentralization approaches for path planning that organically responds to environmental information obtained from various types.
Analyze problem occurrences and response history to assign tasks considering the characteristics of AMRs in each area.
Pathfinding technology that considers unstructured maps, enabling path planning in a Continuous Time Domain environment.
Generate optimal paths in unstructured maps.
Increase production efficiency through path regeneration technology that addresses deadlock situations in narrow pathways.
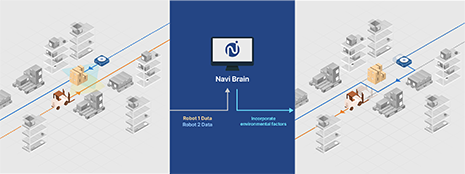
Individual robots use NCP (NaviCore-Path Planning technology) to independently plan paths for each task assigned by the server. (e.g., node 1 -> 2, node 2 -> 3).
Integrate real-time detection and avoidance technology for unexpected situations for each robot to enhance safety, productivity, and real-time response to unexpected events.
Variable kinematics adjustments based on the robot's task (e.g., changing the occupied area for a forklift depending on the load status).
Derive optimal paths using Target reasoning, Corridor reasoning, and Rectangle reasoning algorithms based on the route.
Create a simulation environment identical to the real site with an error margin of within 1% to calculate the takt time.
Playback and control simulation available for required production volume.
Calculate the optimal number of operating robots.
Robot movements, status, and job progress can be easily monitored in the monitoring screen.
Optimal job scheduling plans can be established by predicting runtime, utilization rate, and battery usage for the required production volume.
Predictive error detection, task flow review, and modification capabilities are available.
나비프라 ('www.navifra.com'이하 'navifra')은(는) 「개인정보 보호법」 제30조에 따라 정보주체의 개인정보를 보호하고 이와 관련한 고충을 신속하고 원활하게 처리할 수 있도록 하기 위하여 다음과 같이 개인정보 처리방침을 수립·공개합니다.